제품소개
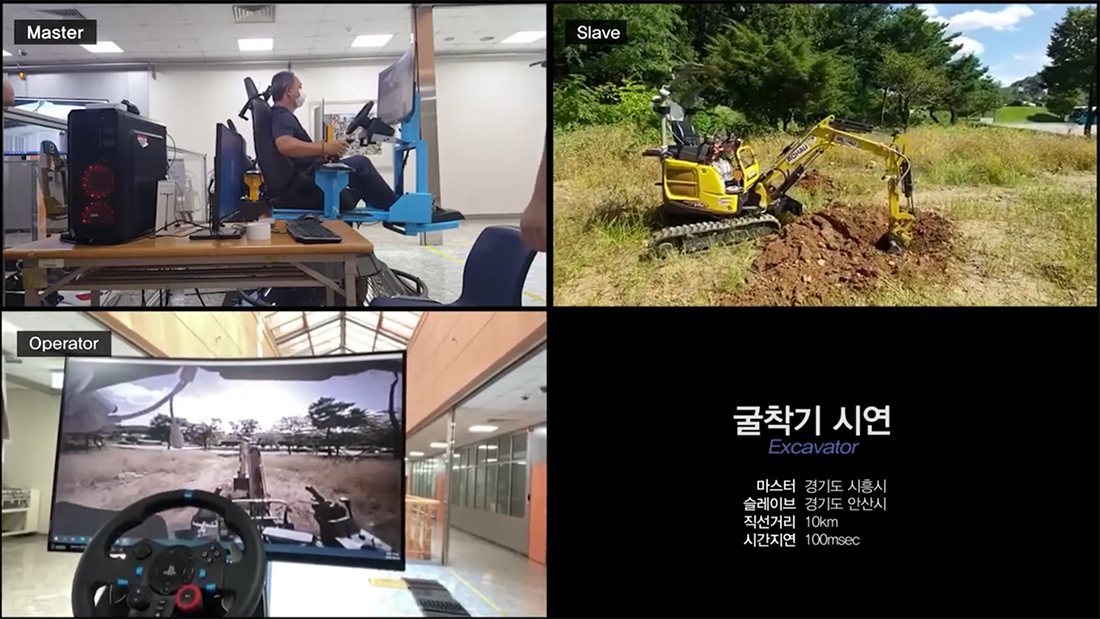
Rolabs (원격 중장비 운전 시스템)
기술소개영상 보기기술소개영상 캡처이미지
뉴스기사 검색이미지



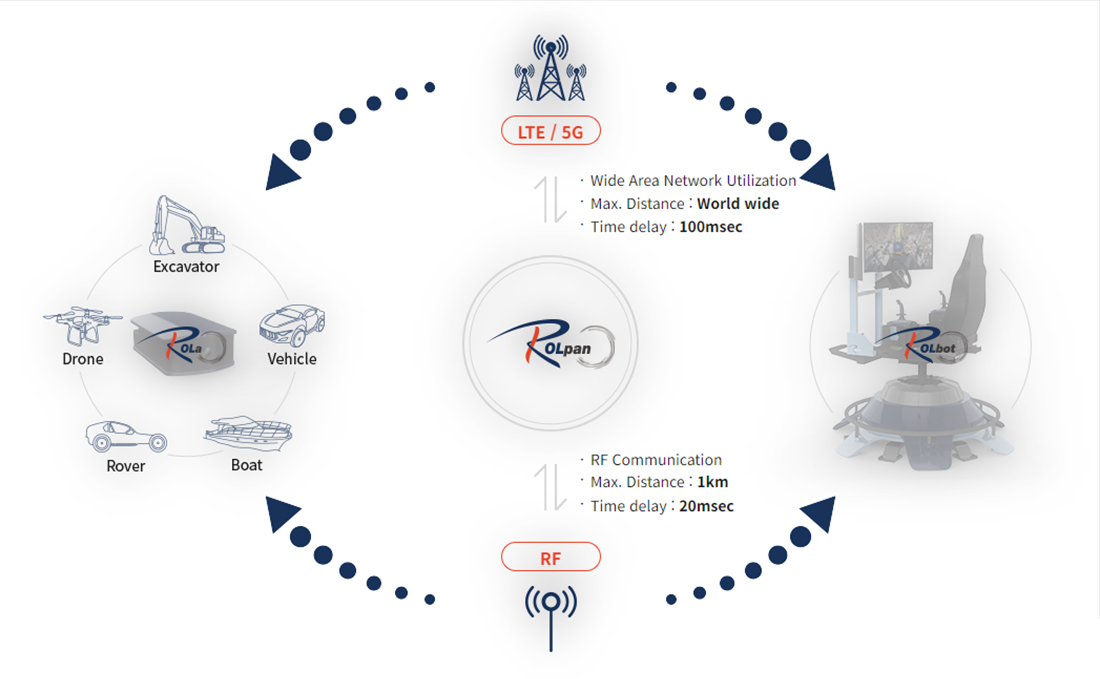
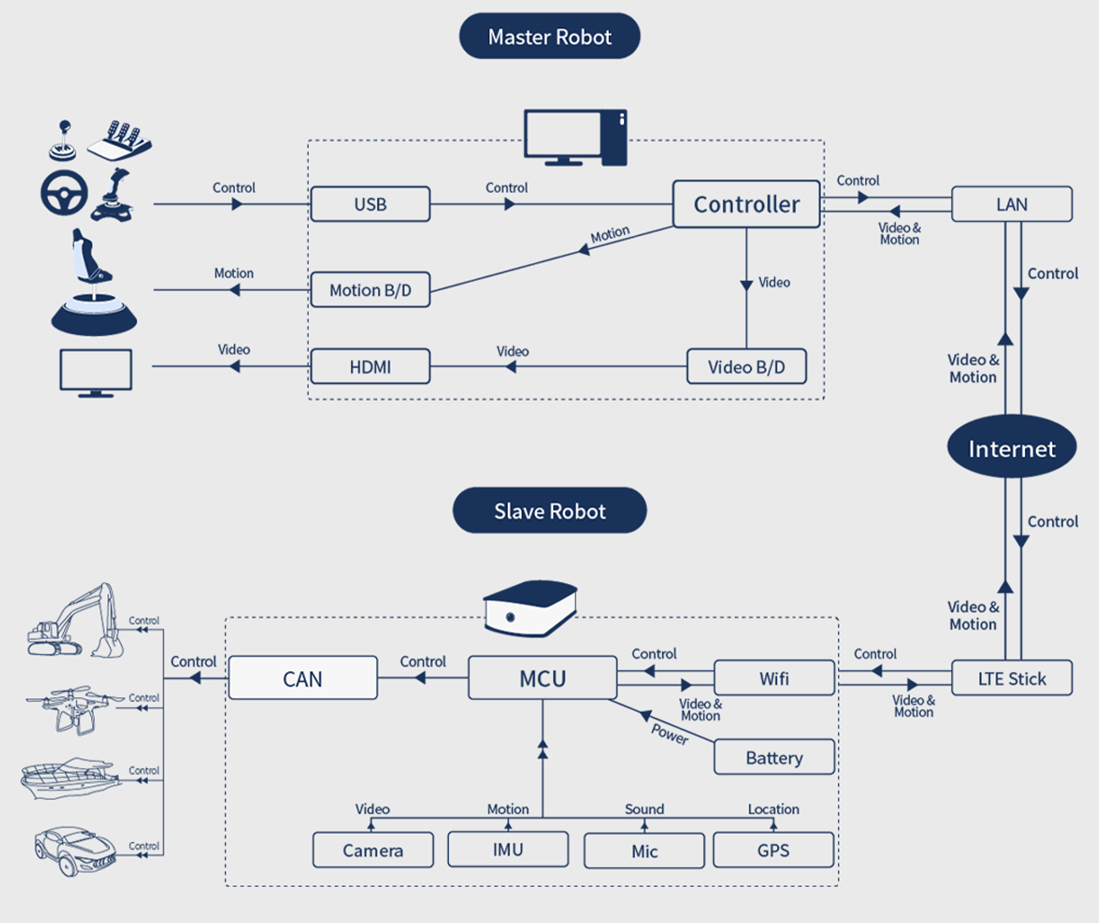
기술구성도
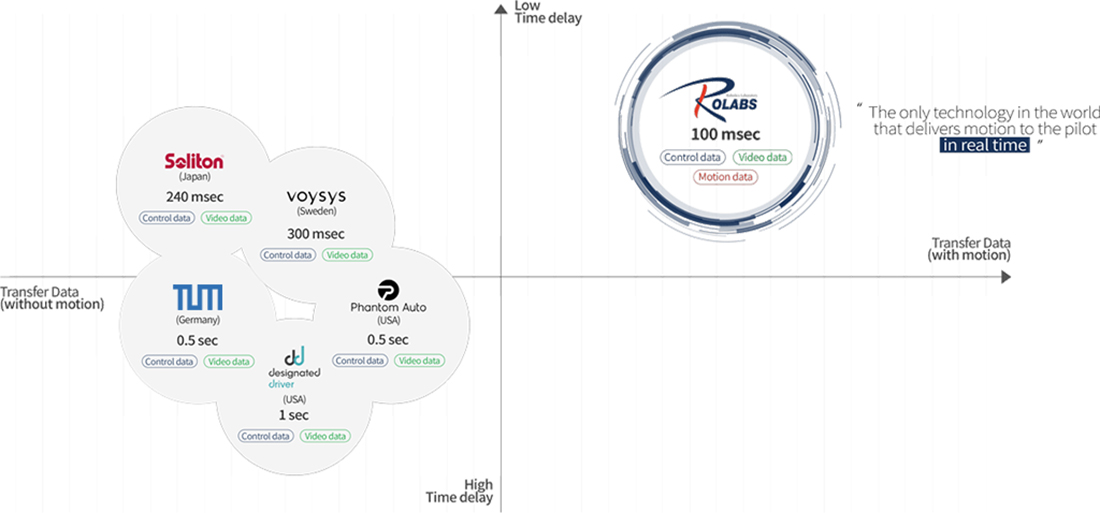
차별성
적용분야



ROLbotDATASHEET

As-Is
- 제한적인 키네매틱 체인의 직렬 메커니즘 사용
- 각각의 직렬 메커니즘은 자체 활성 조인트로 반발력 발생
- 엔드 이펙터가 작업공간 경계로 이동할 때 직렬 메커니즘에 대한 응력이 집중됨
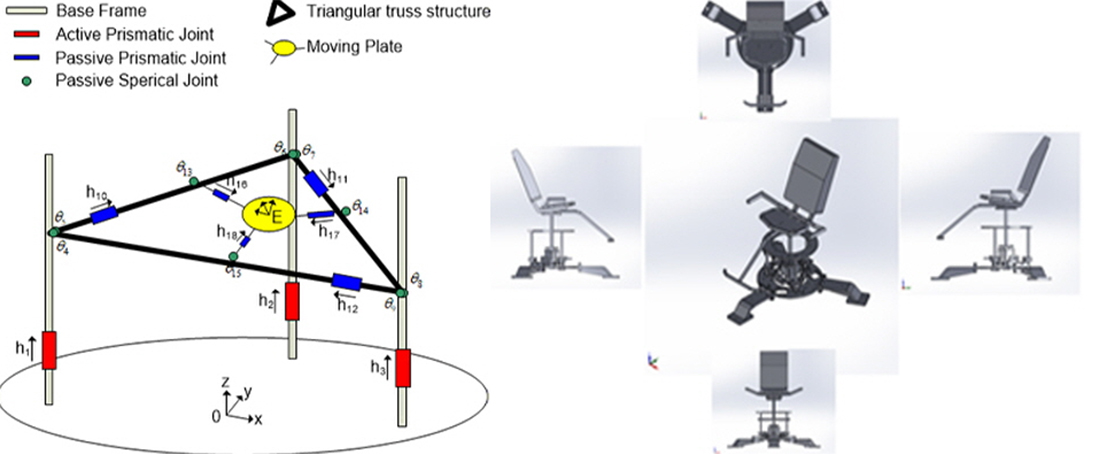
To-Be
- 직렬 체인 사이의 결합된 능동 조인트 메커니즘을 설계하여 무거운 하중유지
- 베이스부는 수직 프레임을 따라 이동하는 3개의 각기둥형의 활성 조인트로 구성
- 삼각 트러스구조는 3개의 링크로 구성 (1-DOF 각기둥형 조인트 1개, 2-DOF 회전 조인트 2개)
- 삼각변의 길이는 가변적임
KEY IDEA
Specification
- Dimension 450mm × 450mm × 600mm
- Controller PC Based AC Servo Motor, C++/MFC
- Working Volume θx = θy = ±20°, θz = ±∞, z = ±75mm
- Weight 96kg
- Max. Speed ≒ 550mm/sec
- Payload 100Kg
- Max. Accel ≒ 1G
ROLbot 모델별 사양

ZILARATOR - 03
- Degree of Freedom 3 axis
- Dimension(mm) 1300 x 1730 (Without case 500 x 370)
-
Velocity Roll: 45°/sec
Pitch: 45°/sec
Z-motion: 150mm/sec -
Displacement Roll: ±20°
Pitch: ±22°
Z-motion: ±80mm - Payload 120kg
- Weight 150kg

ZILARATOR - 04
- Degree of Freedom 4 axis
- Dimension(mm) 1600 x 2220 (Without case 800 x 920)
-
Velocity Roll: 45°/sec
Pitch: 45°/sec
Z-motion: 150mm/sec -
Displacement Roll: ±35°
Pitch: ±35°
Yaw: ±infinite
Z-motion: ±100mm - Payload 120kg
- Weight 150kg

ZILARATOR - rehabilitation
- Degree of Freedom 4 axis
- Dimension(mm) 1650 x 2500 (Without case 800 x 1250)
-
Velocity
Roll: 20°/sec
Pitch: 20°/sec
Yaw:20°/sec
Z-motion: 80mm/sec -
Displacement
Roll: ±30°
Pitch: ±30°
Yaw: ±infinite
Z-motion: ±100mm - Payload 200kg
- Weight 300kg

ZILARATOR - 06
- Degree of Freedom 6 axis
- Dimension(mm) 960 x 690
-
Velocity
Roll: 180°/sec
Pitch: 180°/sec,
Yaw:180°/sec
X,Y,Z-motion: 500mm/sec -
Displacement
Roll: ±20°
Pitch: ±20°
Yaw: ±15°
X,Y-motion: ±50mm
Z-motion: 150mm/sec - Payload 250kg
- Weight 300kg
ROLaDATASHEET
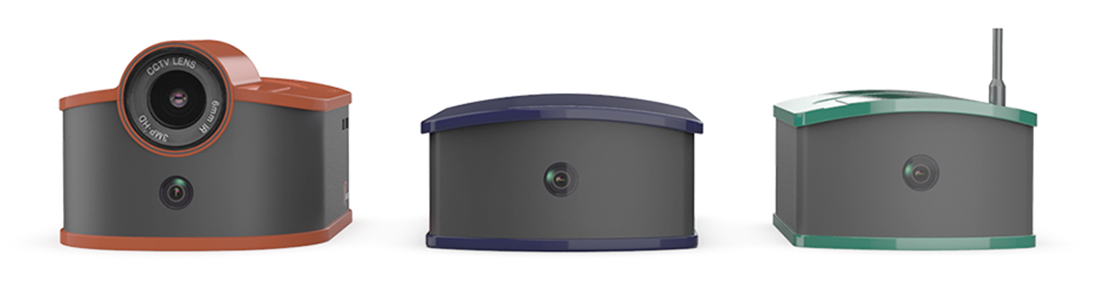
- 다양한 슬레이브 무인 차량을 위한 원격 VCU(차량통제유닛)
- 센서 융합기술을 사용하여 동기화된 모션 및 비디오 데이터 전송
- 거리 제한없이 RF/LTE 통신을 사용하여 마스터와 슬레이브간 원격 제어
KEY IDEA
Specification
- Dimension 45mm × 75mm × 120mm
- CPU 3 x 32-bit LX6 microprocessor
-
Function of core 1: Front camera 2: LTE send 3: Rear camera
4: LTE send 5: LTE Receive 6: IMU/Voice/CAN - Sensor 6 DOF IMU, Camera, GPS, Microphone
- # of Camera 2(Front and Rear)
- Communication RF, LTE, CAN, UART
- Camera View Angle 160°
- Weight 140g
ROLa 모델별 사양
LTE-Streaming VCU
- Degree of Freedom 83 x 120 x 42
-
Main CPU Xtensa dual-core 32-bit LX6 microprocessor,
240 MHz, 600 DMIPS - Wireless connectivity Wi-Fi: 802.11 b/g/n
- GSM standard GSM/2G , UMTS/3G , LTE/4G , WiFi
- Data transfer LTE 150 MBit/s
-
Video Camera Resolution : 2 Mega pixel
SVGA: 30 fps, CIF : 60 fps - # of Video Camera 2 (Front and Rear)
-
Gyro Scale Range ±250°/sec, ±500°/sec, ±1000°/sec,
±2000°/sec - Acceleration Scale Range ±2G, ±4G, ±8G, ±16G
RF-Streaming VCU
- Degree of Freedom 71 x 86 x 44
- Main CPU ATmega328
- RF Freq 868Mhz
- RF Reliable Distance Max. 1km
- Data transfer Max. 27 kbps
- Video Camera 5.8GHz 5 bands 40 channels
- Video Camera Output NTSC
- Gyro Scale Range ±250°/sec, ±500°/sec, ±1000°/sec,±2000°/sec
- Acceleration Scale Range ±2G, ±4G, ±8G, ±16G

LTE-Recording VCU
- Degree of Freedom 79 x 109 x 60
- Main CPU 1-GHZ, Broadcom BCM2835
- Wireless connectivity Wi-Fi: 802.11 b/g/n
- GSM standard GSM/2G , UMTS/3G , LTE/4G , WiFi
- Data transfer LTE 150 MBit/s
-
Video Camera Resolution : 2 Mega pixel
SVGA : 30 fps / CIF : 60 fps - # of Video Camera 2 (Front and Rear)
-
Recording Camera Resolution : 12.3-Mega pixel high-resolution
Output : RAW12/10/8, COMP8
Transfer rate : 1080p 30fps, 720p 60fps, 640 × 480p 60fps/90fps - # of Recording Camera 1(Front)
- Gyro Scale Range ±250°/sec, ±500°/sec, ±1000°/sec, ±2000°/sec
- Acceleration Scale Range ±2G, ±4G, ±8G, ±16G
- Audio Electric Condenser Microphone
- Multi-satellite positioning systems support GPS/QZSS/GLONASS
ROLpan
ROLpan 구성도

KEY IDEA
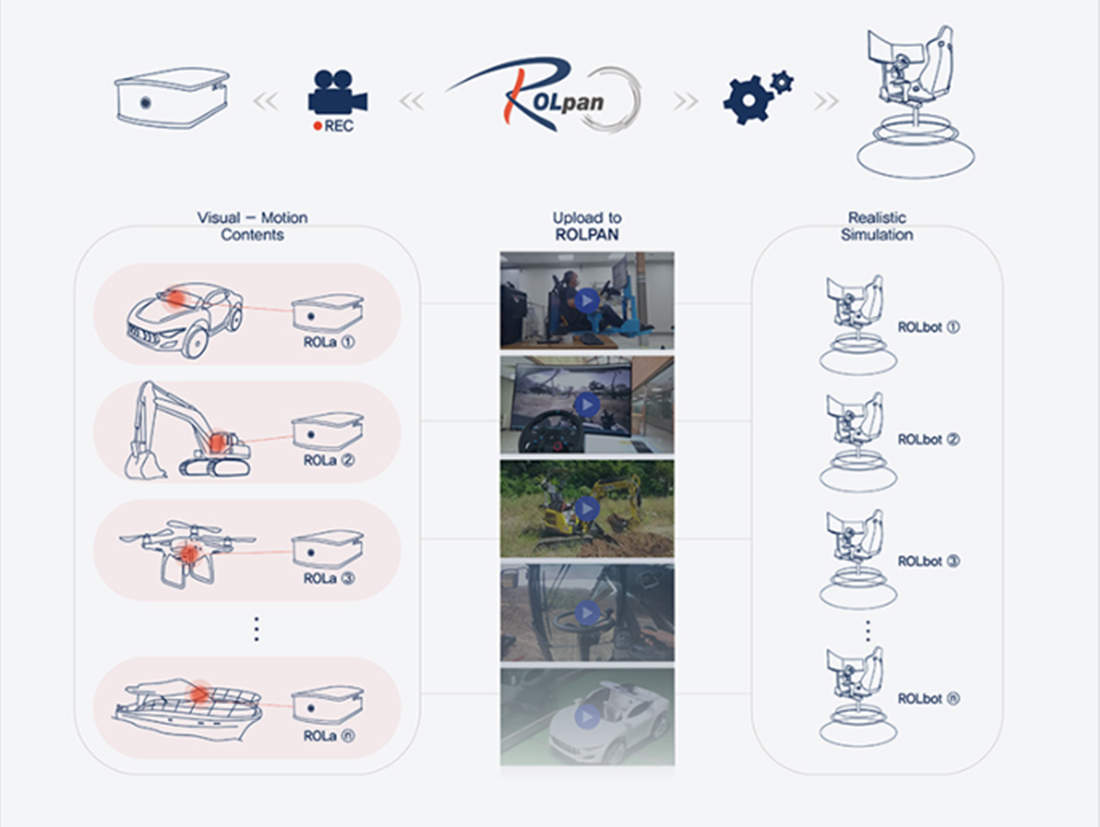
ROLABS 프로세스
